0.00р.
Оформить заказ
Ваш город:
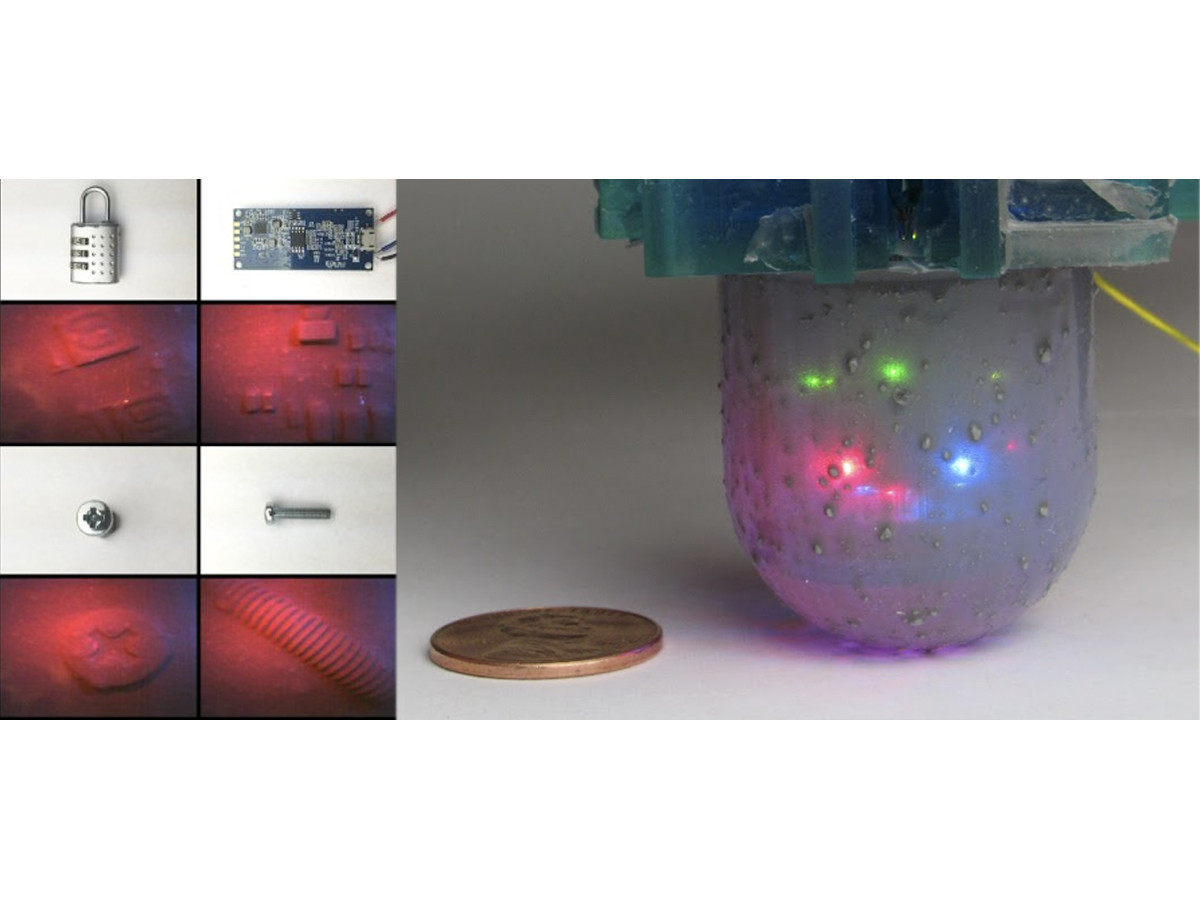
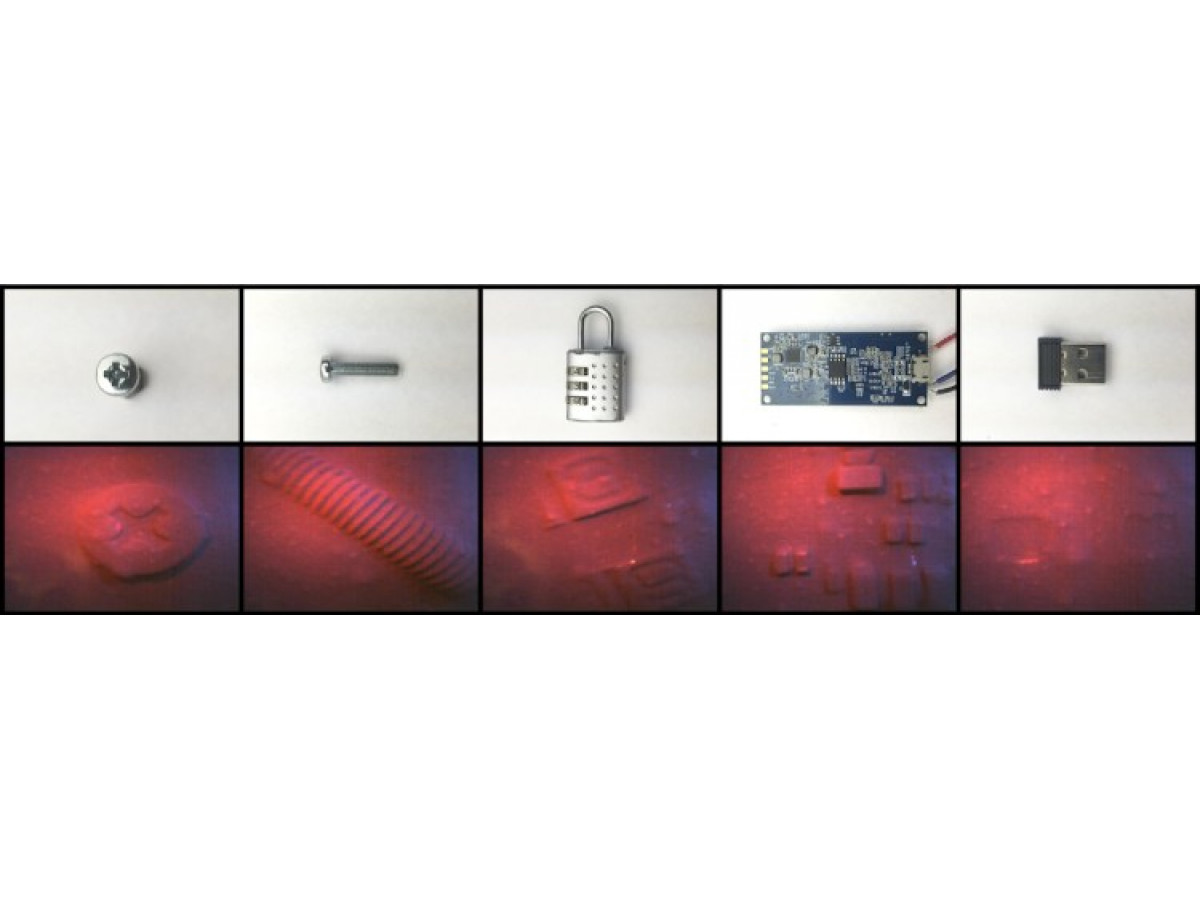
Группа исследователей из Калифорнийского университета в Беркли разработала новый разнонаправленный тактильный датчик, который может использоваться в качестве кончика пальца у роботизированных манипуляторов. Датчик получил название OmniTact; он использует несколько микрокамер для обнаружения разнонаправленных деформаций геля, который заменяет кожный покров роботизированного пальца. Это позволяет получить разнообразные сигналы, из которых можно вывести множество различных переменных состояния контакта с использованием современных методов обработки изображений и компьютерного зрения.
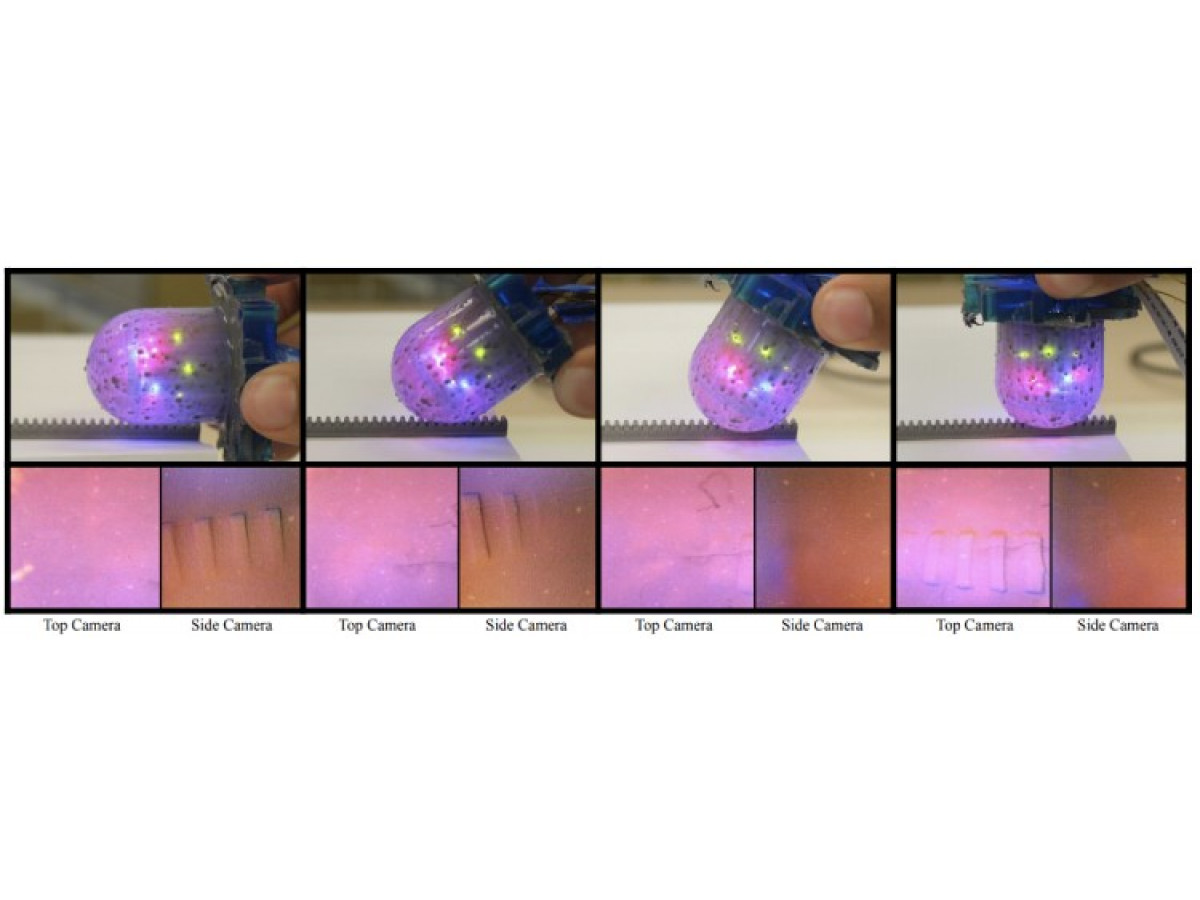
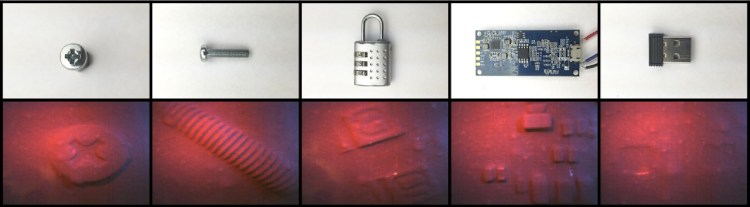
Датчик был создан путем встраивания нескольких микрокамер в искусственную кожу, изготовленную из силиконового геля; он обладает возможностями считывания данных со всех сторон. Это позволяет роботам получать доступ к тактильной обратной связи при контакте с объектами в любом направлении. Камеры обнаруживают разнонаправленные деформации гелевого слоя, создавая сигнал, который затем может быть проанализирован с помощью методов компьютерного зрения и обработки изображений. Результатом обработки является информация об объектах, которыми манипулирует робот.
OmniTact может предоставлять данные высокого разрешения, отличается компактностью и изогнутой формой. Будучи встроенным в захват или роботизированную руку, датчик действует как чувствительный искусственный палец, который позволяет роботу воспринимать широкий спектр объектов различной формы и размеров, и манипулировать этими объектами на основе полученных данных.
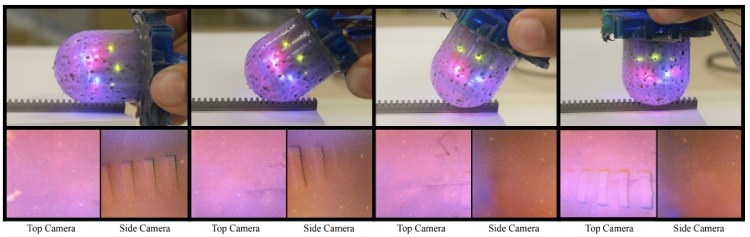
В ходе экспериментов с OmniTact было обнаружено, что разнонаправленное тактильное считывание данных позволяет выполнять некоторые мелкие манипуляции, например такие, как вставка разъема. Таким образом, был сделан вывод, что OmniTact намного компактнее, чем ранее разработанные датчики GelSight, и обеспечивает более широкий спектр возможностей применения в робототехнике. Кроме того, это может способствовать созданию новых роботов с более совершенными сенсорными возможностями.
OmniTact - проект с открытым кодом, который Вы можете найти на Github.